Udacity launches Self-Driving Car Nanodegree in partnership with Mercedes-Benz, Nvidia and others

The Self-Driving Car industry is moving fast, sometimes too fast to keep track of the all the updates. Last week alone, Tesla announced the launch of AutoPilot 8.0, Uber started picking up customers with their self-driving car in Pittsburgh and Comma ai, the startup that plans to turn any car into a self-driving car announced that they will be shipping a $999 Autonomous driving add-on by the end of this year.
Naturally, the industry is looking for the best talent to hire and it looks like engineers with working experience on self-driving cars are hard to find. The latest Nanodegree from Udacity is targeting exactly this demand with the “Self-Driving Car Engineer Nanodegree” program.
Self-Driving Car Engineer Nanodegree
None other than Sebastian Thrun, the founder of Google’s Self-Driving Car program (and Street view) is one of the lead instructors of the nanodegree. Udacity has partnered with Mercedes-Benz, Didi, Otto and Nvidia for the program and aims to turn you into a Self-Driving car engineer in 9 months for $2400 (scholarships are available as well). Udacity says that the partners (i.e. Mercedes-Benz, Nvidia and Otto) will actively review the candidates of the nanodegree for potential positions at their companies.
And Guess what? There are already over 3000 people who have applied for the 250 seats on the course! “A $2,400 Class to Make Anyone a Self-Driving Car Engineer” – Wired.

#Business



Next article
Playing for Data: Using GTA to teach self-driving cars to navigate the real-world
273,588.430 – that is the exact number of kilometres Google’s fleet of 58 cars clocked for their Self-Driving Car project in August this year (Google report)! Although Artificial Intelligence and Machine Learning are so advanced today that we can teach our computers to do amazing things, the algorithms that enable them require tons of data if they are to be 100% accurate (and efficient). That is why a company like Google is driving around so much (in a month).
Playing for Data
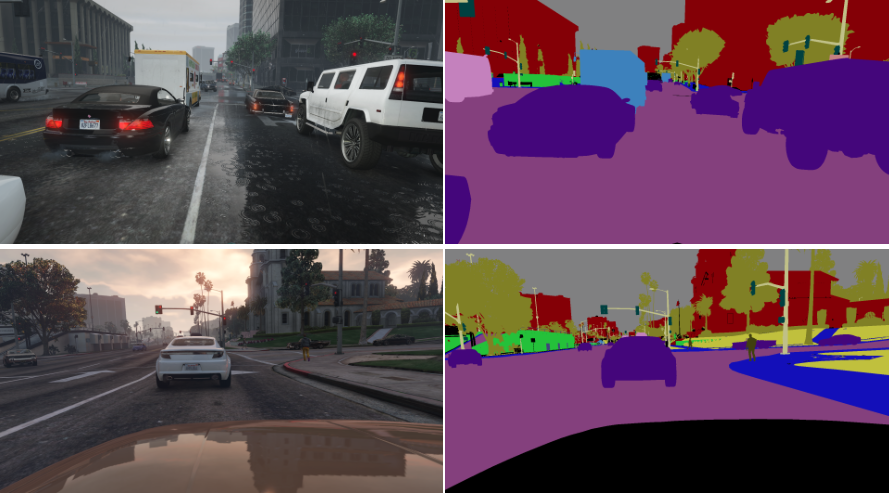
Is driving around for hundreds of thousands of hours (in the real-world) the only possible way for us to teach cars how to drive autonomously? Sure, simulation can help but it has its limitations. There might be another alternative to simulation – researchers at TU Darmstadt, Germany and Intel Labs are using Grand Theft Auto’s streets for data!
Playing for Data: Ground Truth from Computer Games
In the paper, “Playing for Data: Ground Truth from Computer Games“, the authors extracted 25,000 frames with varying weather conditions at different times of day from GTA to be used as training data for classification of pedestrians and another objects a self-driving car is likely to encounter in the real-world.
Really interesting approach for getting ground truth for your classification algorithm. Who knew all those gaming videos on Youtube might turn out to be research material for self-driving cars later on!
Data and more information
Interested in reading the paper? It’s available here. The data and the labels used for training the algorithms is available here (the code isn’t available yet).