
In 2009, a group of researchers from Northeastern University received a grant of $18 million from the National Institute of Standards and Technology to develop a new pavement inspection method (Voters Project).
$18 Million might sound like a lot for research work in the area of pavement inspection but aging road infrastructure is a problem across the world with millions being spent on the upkeep and maintenance of roadways each year. In USA alone, more than 2 million kilometers are in poor or mediocre conditions, costing the taxpayers over $67 Billion in repairs and operating costs (American Society of Civil Engineering’s 2013 Report Card for America’s Infrastructure). The outdated methodology of making visual surface observations wasn’t helping matters either. Clearly there was a need for a better system.
The StreetScan Team
StreetScan
5 years later, the group from Northeastern University concluded its research work; coming with a prototype mobile sensor system capable of detecting road defects and a GIS application that could be used as a budget planning/maintenance tool for decision-makers to implement their infrastructure plans with a data-driven approach.
Realising the commercial potential and impact their research has, the researchers in the group decided to spin off and created the startup – StreetScan.
In fact, over the course of their research, the team published over 115 articles. It’s not everyday that you see research work having an immediate impact on the society.
StreetScan’s end-to-end road inspection and management service comprises of two main components – the ScanVan, a van mounted with their data collection system and PaveMon, the GIS based planning tool for decision-makers and urban planners.
Side note: If you have a company let by researchers product names will end up being acronyms 😉
ScanVan – StreetScan’s data collection system consists of multiple sensors that record three modalities of acoustic, optical, and electromagnetic waves and can scan more than 100 miles a day.

As the “ScanVan” drives over the road, a sensor inside the tire measures changes in the pressure caused by road bumps. A microphone, calibrated to only listen to tire/road interactions, senses jostling noises, and a mm-wave radar system scans the surface between the wheels, ensuring no defects were missed by the acoustic sensors. Two video cameras installed on the back and front of ScanVan help corroborate info from the other sensors while automatically measuring pavement cracks. In addition to surface, the ScanVan also gauges the internal damage to the subsurface layers with a ground penetrating radar (GPR) array.
“ScanVan” only needs 6 feet between itself and the next car but has to drive in each lane in order to ensure completeness in a multi-lane roadway and this is where being a partner of the Esri’s Startup Program proves really helpful for them. They use Esri’s network analyst to solve this special case of the ‘travelling salesman’ problem, ensuring that the data collection is effective and doesn’t involve making too much turns for the person behind the wheels (okay, that’s obvious use case for self-driving cars right there!).
Their partnership with Esri doesn’t stop with the network analyst. In some sense, they use the entire Esri pipeline for their analysis. All the measurements are geo-referenced and tied together with additional road identifier i.e. street names, etc. Of course, considering the amount and pace at which the system creates the data, the whole process is automated using the ArcPy library (Related: Programming in ArcGIS with Python – A Beginners Guide).
Visualising and Making Sense of the Data
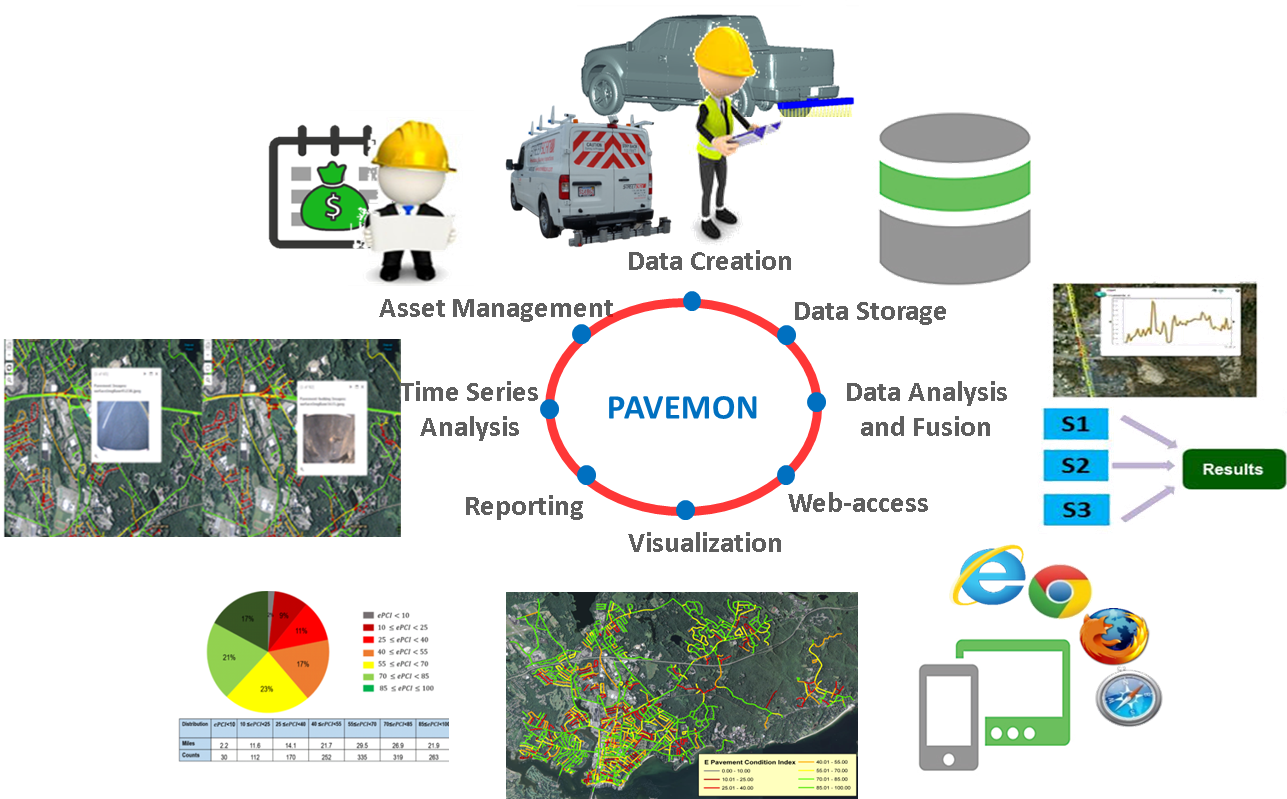
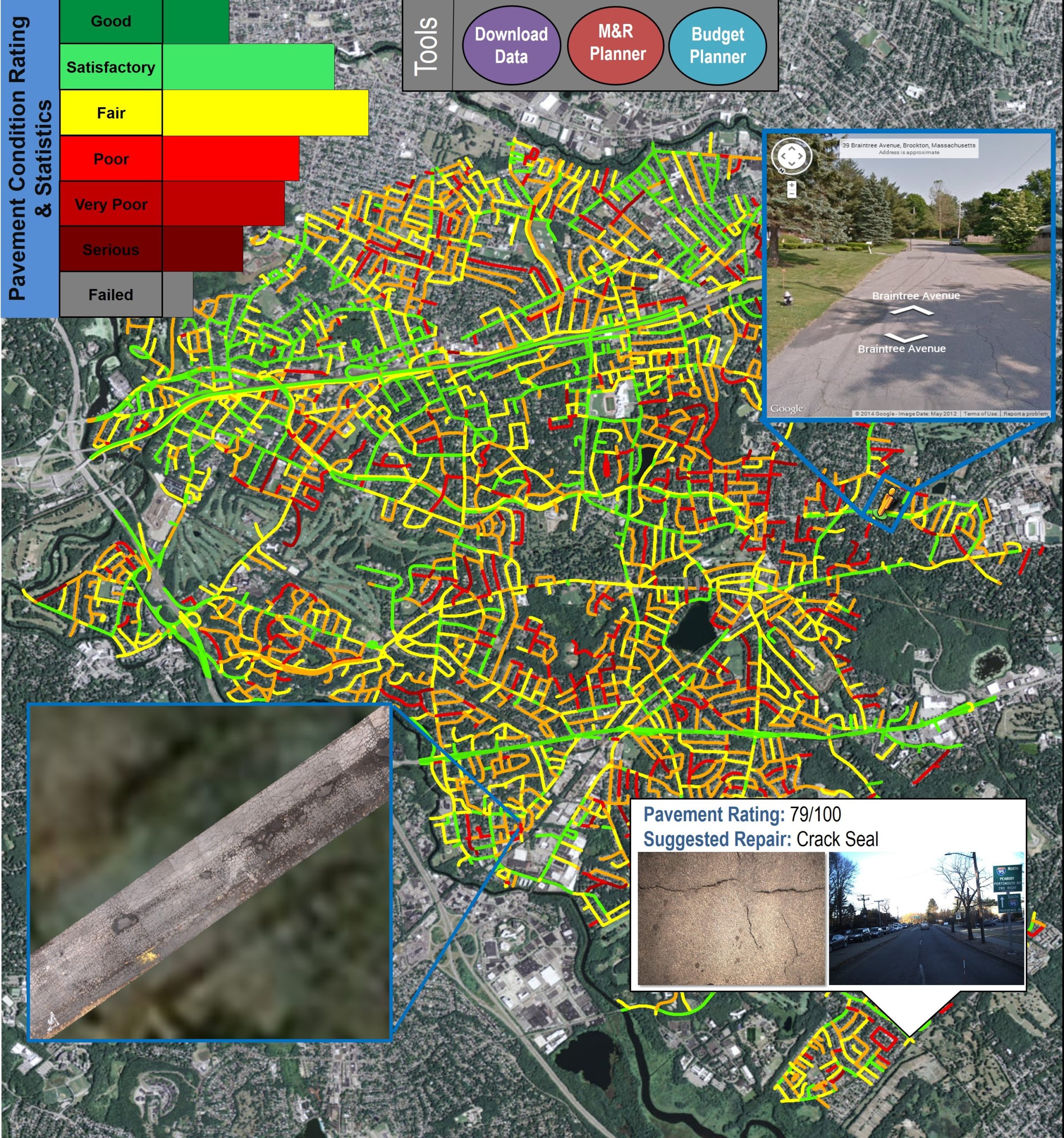
All the measurements and analysis finally result in the “Pavement Condition Index” being computed for each road segment. Of course, presenting this information in a easy-to-use and visual is crucial and that’s where StreetScan’s Pavement Monitoring System (PaveMon) comes into the picture.
 The last piece of the puzzle is planning – all the data will be useless if the authorities can’t decide which roads to repair first and how to plan their repairs over the next years. StreetScan’s Pavement Manager (PaveMan) not only projects how much it will cost to repair the roads but also takes into account other factors like weather to compute the deterioration of existing road conditions. Basically it’s the one-stop toolbox for planning and executing an entire road management program.
The last piece of the puzzle is planning – all the data will be useless if the authorities can’t decide which roads to repair first and how to plan their repairs over the next years. StreetScan’s Pavement Manager (PaveMan) not only projects how much it will cost to repair the roads but also takes into account other factors like weather to compute the deterioration of existing road conditions. Basically it’s the one-stop toolbox for planning and executing an entire road management program.
 The best part about all of this is that all of StreetScan’s technologies and GIS application is already being used by cities. The City of Newton in Massachusetts had recently announced their new transportation strategy based on inputs from StreetScan’s analysis of the existing road network (Boston Global article).
The best part about all of this is that all of StreetScan’s technologies and GIS application is already being used by cities. The City of Newton in Massachusetts had recently announced their new transportation strategy based on inputs from StreetScan’s analysis of the existing road network (Boston Global article).
Kudos StreetScan! Keep the awesomeness going!

#Business


Next article
Microsoft is probably one of the few tech giants that isn’t directly working on autonomous cars, instead they have signalled their intentions to serve as the de-facto cloud service platform for autonomous cars. And in a move at strengthening their position, Microsoft has announced a partnership with Esri, HERE and TomTom to create a ‘world graph’.
Microsoft + Esri, HERE and TomTom
This is the first time Microsoft and TomTom have partnered together to bring the latter’s mapping data and info to the Azure platform, including its High Definition Map and RoadDNA technology for autonomous driving.
HERE is a longterm partner of Microsoft – Bing, Cortana, Windows and Office all use mapping data from HERE. The new agreement with HERE allows Microsoft to expand the use of HERE data and services to in-vehicle productivity scenarios.
By integrating ArcGIS’s location-based service and analytical capabilities into the Azure IoT suite among other apps and services, Microsoft’s cloud service is spatially capable. Microsoft already has an existing partnership with Esri to bring ArcMap capabilities to Power BI and the new partnership is going to help Azure win customers working in the smart cities sector.
The next big concept in graph technology
Together with our partners, our bold ambition is to create the next “world graph,” a new data index of physical places, objects and devices and their interconnectivity. We believe this repository of geospatial data will be the next big concept in graph technology, which already includes well-established systems such as Bing’s knowledge graph, Facebook’s people graph and Microsoft Office’s and LinkedIn’s professional graph. –
It’s interesting that both HERE and TomTom have agreed to partner with Microsoft and even share a stage. These are still early days for the autonomous driving and having their APIs easily accessible on Cloud service platforms like Azure is an absolute must for both the mapping companies, if they want to compete in a fast-changing market. It’s going to be interesting to see how this competition develops.