
The way we map the world is changing fast. One of the most detailed population density maps of the world was created by Facebook, a company that until recently no one would have associated with maps, of any kind (Read: Facebook created the most detailed Population Density Map to bring the rest of the world online). We are beginning to usher in a new era in mapping – an era in which maps generated by machine learning algorithms.
Machine Learning and Satellite Imagery
By 2030, United Nations hopes to eradicate poverty worldwide and in the data-driven world that we live in, its extremely important to measure our progress towards that goal. The traditional way to measure progress would be to undertake ground surveys. A team from Stanford university has another method to map poverty, using deep learning and satellite imagery.

Stanford researchers use machine learning to compare the nighttime lights in Africa – indicative of electricity and economic activity – with daytime satellite images of roads, urban areas, bodies of water and farmland. (Image from Stanford.edu)
In the paper titled “Transfer Learning from Deep Features for Remote Sensing and Poverty Mapping“, the interdisciplinary team comprising of researchers from the Computer Science and Earth System Science department have introduced a new transfer learning approach for poverty estimation based on satellite imagery.
Mapping Poverty Using Satellite Imagery
Electricity and nighttime lights are one of the modern indicators of economic activity and the lack of artificial lights during night time is regarded as a sign of relative poverty and a machine learning system that has access to a treasure trove of day time and night time satellite imagery together with “ground truth” (poverty data collected using traditional methods) can come up with some interesting associations which can be then used to map poverty in areas where such ground truth.
“Basically, we provided the machine-learning system with daytime and nighttime satellite imagery and asked it to make predictions on poverty,” said Stefano Ermon, assistant professor of computer science. “The system essentially learned how to solve the problem by comparing those two sets of images.” – Stanford.edu
The research work has been nominated for NVIDIA’s 2016 Global Impact Award (Read: How GPUs are helping Map Worldwide Poverty). If you are interested in learning more about the work – check out the post on Stanford University’s page.
What Next?
Facebook already proved how useful machine learning can be to extend the capabilities of remote sensing. Training the computer to classify an area based on training samples is a technique that has been applied in image processing since a long time now but the algorithms where always computational expensive and didn’t scale well enough to be applied on a global scale. Machine learning and deep learning are providing a means to scale it to a global level, taking remote sensing to ever greater heights.
Even as they consider what they might be able to do with more abundant satellite imagery, the Stanford researchers are contemplating what they could do with different raw data – say, mobile phone activity. Mobile phone networks have exploded across the developing world, said Burke, and he can envision ways to apply machine-learning systems to identify a wide variety of prosperity indicators.
“We won’t know until we try,” Lobell said. “The beauty of machine learning in general is that it’s very useful at finding that one thing in a million that works. Machines are quite good at that.” – Stanford.edu

#


Next article

The launch of high resolution radar satellites such as the German TerraSAR-X satellite (launched in summer 2006, resolution of 1m, 3m or 16m m depending on the recording mode) opened new possibilities in monitoring traffic flows from space. Indeed, the German Aerospace Centre (DLR) has developed and installed an automatic and already operational traffic processor at the TerraSAR-X ground segment. This processor is designed to automatically detect moving objects in Synthetic Aperture Radar (SAR) images, to assign it to an existing road network and the estimation of the velocity.
However, the detection of moving objects faces some difficulties, as the motion on ground provokes a shift of the object in the SAR image. Moving objects appear shifted from their actual road or network position: Cars or trucks seem to drive on fields; trains, which are well represented as whitish long lines (see figure below), are shifted into the surroundings of the actual tracks and also ships appear apart from their actual route (see second image below).
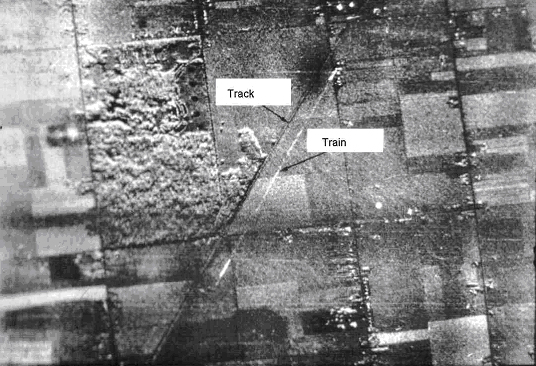
A moving train is not running on its (dark grey) tracks, but shifted to the right hand side in the SAR image.
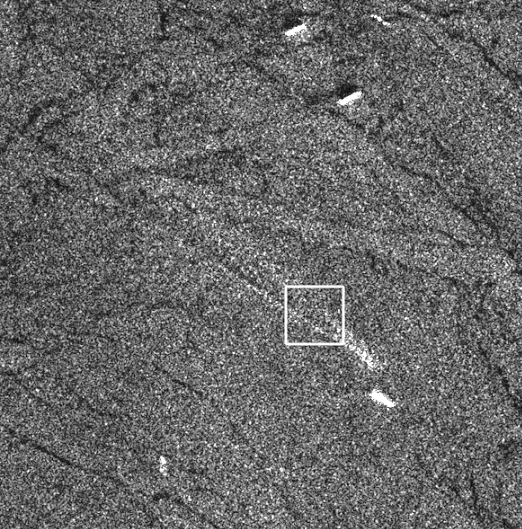
SeaSAR Image of a ship crossing the english channel. The ship at the front seems off its route. Source: W.Alpers
Where does the shift in SAR images come from?
Apart from the constallation of a satellite, the geometry of a sensor, the wave length and look angles, SAR processors take advantage of the Doppler frequency, which linearly changes from positive to negative values when the sensor passes a target object. Thereby, standard SAR-processing methods are based upon the assumption of a static scene or in other words the stationary of the detected objects. If the target has a velocity component, its doppler shift is changed compared with that from a stationary reflector. As a consequence the SAR gets confused and produces artefacts in the final image displacing the motion objects. The displacement depends on the moving direction of the individual objects: An object moving linearly in along–track (azimuth) direction causes a blurring in azimuth direction whereas an object moving in cross–track (range) direction causes mainly a displacement in azimuth direction. These imaging errors can be compensated for by detecting the moving objects, estimating their velocities and positions, and compensating for their motion.
Detecting moving objects in SAR images
Up to now, various methods for the detection and imaging of moving targets and the estimation of their real positions have been developed (see the literature below). For instance, multiple SAR-images or sub-apertures can be used for the detection of moving targets and the estimation of their velocity vectors. To detect moving objects and estimate their ground speed the DLR takes advantage from a geometric characteristic of the TerraSAR-X antenna: Two SAR antennas are spatially aligned in flight direction and separated by the along track baseline. This dual receive antenna mode electronically splits up the antenna into two parts in the along track direction upon receiving. As the satellite platform moves on with a certain velocity, both antennas map the same ground area with a temporal separation that is defined by the distance between the two antennas. In this manner the along track interferometry (ATI) becomes possible, which is sensitive to moving objects.
The list of papers at the bottom gives detailed information about the methods of detecting moving objects and estimating their ground speed in SAR imagery.
Suchandt S., Runge H., Breit H., Steinbrecher U., Kotenkov A. and Balss Ulrich, 2009: Automatic Extraction of Traffic Flows Using TerraSAR-X Along-Track Interferometry. IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 48, NO. 2, FEBRUARY 2010
Axelsson S., 2004: Position correction of moving targets in SAR-imagery. SAR Image Analysis, Modeling, and Techniques VI, edited by Francesco Posa, Proceedings of SPIE Vol. 5236 (SPIE, Bellingham, WA, 2004), doi: 10.1117/12.511213
Kirscht M., 1999: Estimation of velocity, shape and position of moving objects with SAR. Fourth International Airborne Remote Sensing Conference and Exhibition /21st Canadian Symposium on Remote Sensing, Ottawa, Ontario, Canada, 21–24 June 1999
Alpers W., 2008: SAR imaging of moving objects, including ships and ocean surface waves. ESA-MONRE/RSC Training Course Hanoi., 25 February – 7 March 2008
More literature:
R.K. Raney, 1971: Synthetic Aperture Imaging Radar and Moving Targets, IEEE AES-7, pp. 499-505.
R.K. Raney, 1971: Synthetic Aperture Imaging Radar and Moving Targets, IEEE AES-7, pp. 499-505.
K. Ouchi, 1985: On the Multilook Images of Moving Targets by SAR, IEEE AES-33, pp. 823-827.
J.R. Moreira, W. Keydel, 1995: A New MTI-SAR Approach Using the Reflectivity Displacement method, IEEE GRS-33, pp. 1238-1244.
J. Meyer-Hilberg, C. Gschössl, 1998: Detection and Repositioning of Moving Targets in SAR Images, Proc. International Radar Symposium, Munich.
R. Klemm, 1991: Adaptive Airborne MTI with Two-dimensional Motion Compensation, IEE Proc.-F , pp. 551-558.
J.H.G. Ender, 1996: Detection and Estimation of Moving Target Signals by Multi-Channel SAR, AEU Int. J: Electron. Commun. 50:2, pp. 150-156.
D.J. Coe, R.G. White, 1996: Experimental Moving Target Detection Results from a Three-Beam Airborne SAR, AEU Int. J: Electron. Commun. 50:2, pp. 150-156.
S. Barbarossa, A. Farina, 1994: Space-Time Processing of Synthetic Aperture radar Signals. IEEE AES-30, pp. 341-357.
S. Barbarossa: Detection and Imaging of Moving Objects with synthetic Aperture Radar. Part I: Optimal Detection and Parameter Estimation, IEE Proc.-F, February 1992, pp. 79-88.
S. Barbarossa, 1992: Detection and Imaging of Moving Objects with Synthetic Aperture Radar. Part II: Joint Time-Frequency Analysis by Wigner-Ville Distribution, IEE Proc.-F, pp. 89-97.
S. Werness, W. Carrara, L. Joyce and D. Franczak, 1990: Moving Target Imaging Algorithm for SAR Data., IEEE, vol, AES-26, no.1, pp. 57-67.
S. Barbarossa and A. Scaglione, 1998: Autofocusing of SAR Images Based on the Product high-order ambiguity function, IEE Proc.-F, pp. 269-273.
A. Rihaczek and S. J. Hershkowitz, 1996: Radar Resolution and Complex-Image Analysis. Artech House
R.P. Perry, R.C. DiPetro and R.L. Fante, 1999: SAR Imaging of Moving Targets, IEEE, vol. AES-35:1, pp. 188-200.
V.C. Chen and S. Qian, 1998: Joint Time-Frequency transform for Radar Range-Doppler Imaging. IEEE, vol. AES-34, no.2, pp. 486-499.
M. Soumekh, 2002: Moving target detection and imaging using an X-band along-track monopulse SAR, IEEE transactions on Aerospace and Electronic Systems, vol. 38, pp. 315-333.
M. Kirscht, 2003: Detection and imaging of arbitrary moving targets with single-channel SAR, Proc. IEE Radar Sonar Navig., vol. 150, pp. 7-11.
J.M.B. Dias and P.A.C. Marques, 2003: Multiple moving target detection and trajectory estimation using a single SAR sensor, IEEE Transactions on Aerospace and Electronic Systems, vol. 39, pp. 604-624.
S.R.J. Axelsson 1999, Methods for the detection and position correction of moving targets in SAR-images, Proc. Radio Science and Communication, RVK99, Karlskrona, Sweden, 14-17, pp. 150-156.